Isaac通过ros2控制机器人
好久没更新博客了,学习方向也发生了改变,不搞游戏啦。
不更新博客是因为使用了 Obisidian ,多端同步太爽了,由于我大量使用了双链,不适合发博客,所以只能偶尔整理出一篇文章来。
本教程大量使用了官方的插件,如果未找到笔者所使用的插件,请翻阅工作区所有子目录,若未找到,请去 Extensions 内开启或下载(Isaac不同版本之间工作区目录非常不一样,FUCK NVIDIA)。 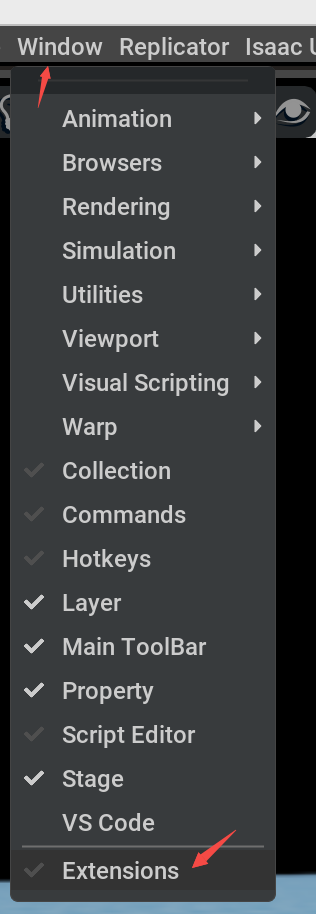
导入模型
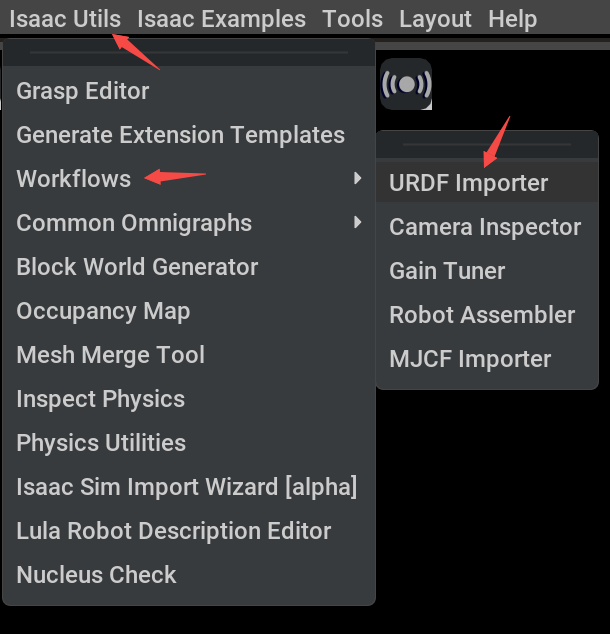
Input File选.urdf文件即可,设置如下: 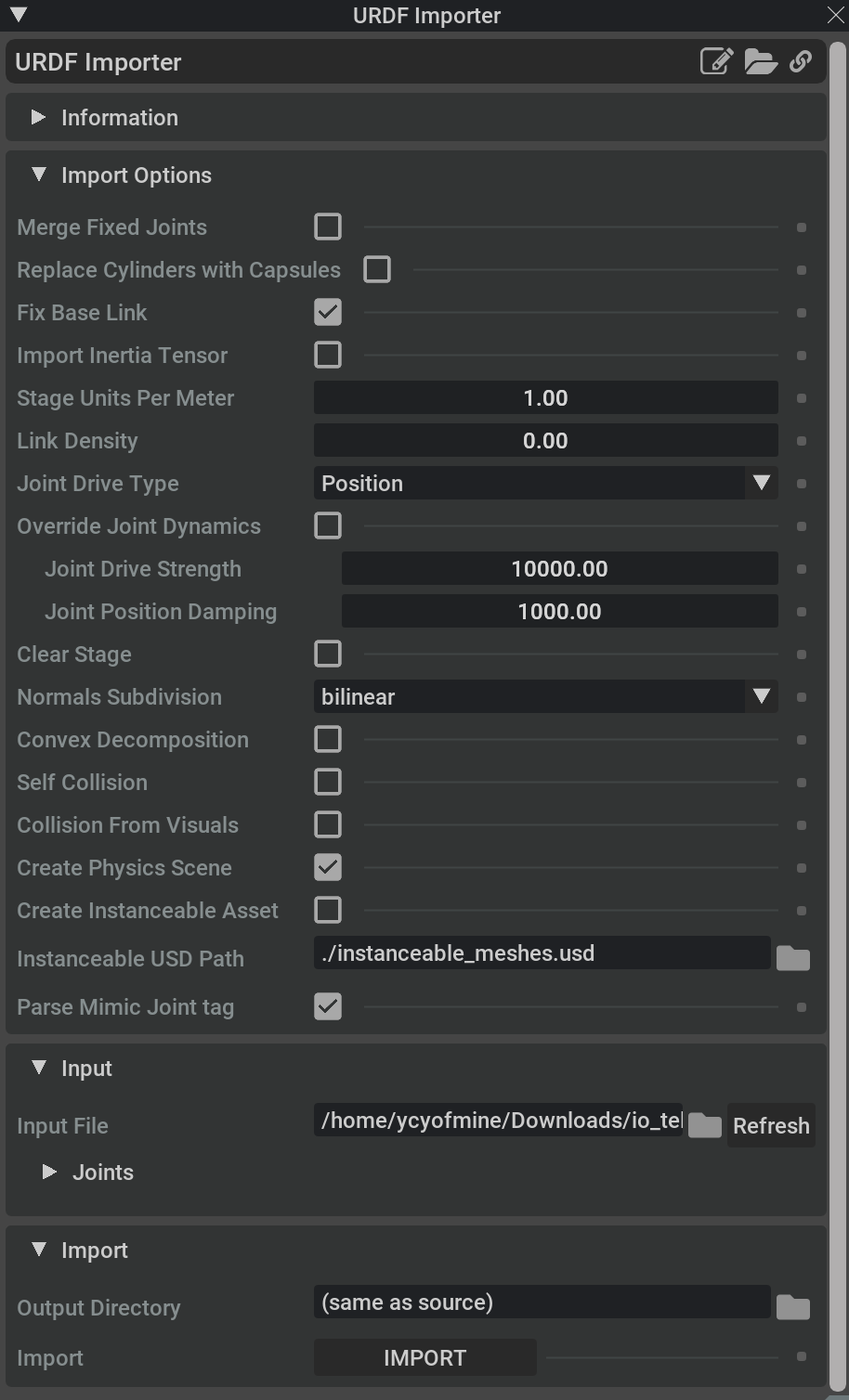
官方是将URDF转换成USD并导入。 ⚠️插件会将URDF中关节名中部分的 - 转换成 _ ,编写ros2代码的时候请注意。
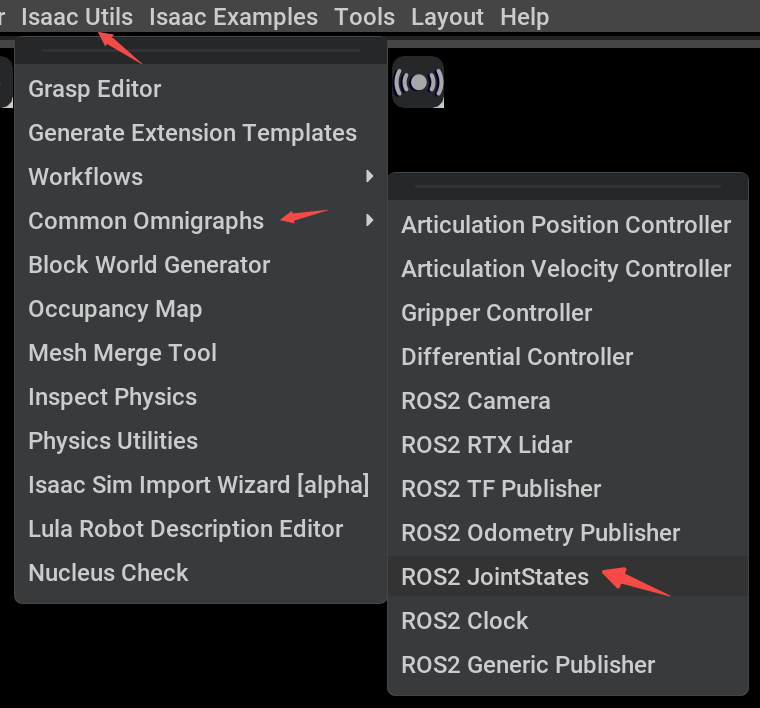
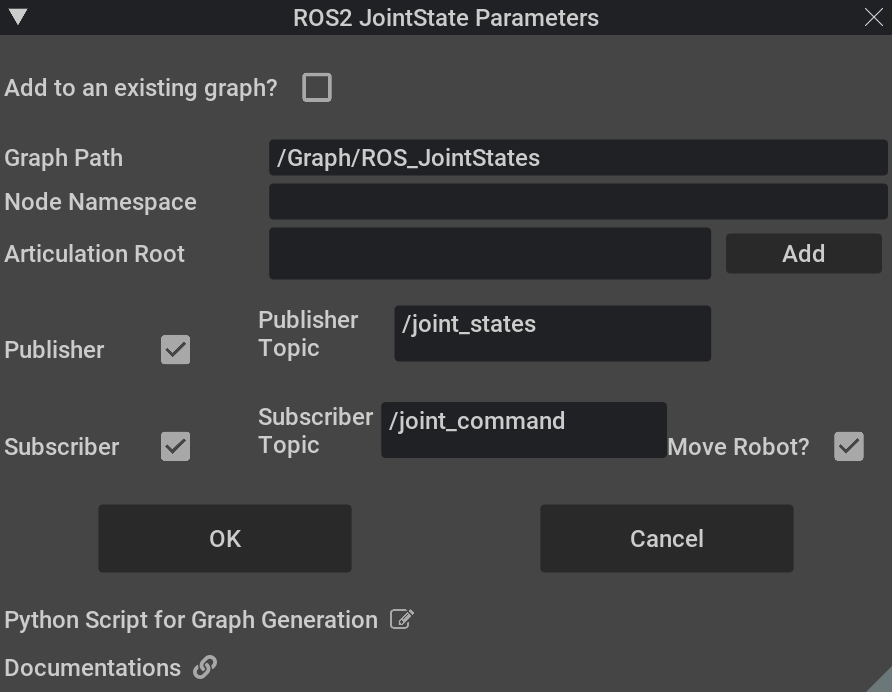
机器人设置subscriber和publisher
Articulation Root 选导入进来的机器人的根目录即可
 ⚠️此时打开新建出来 Graph 下的 Graph 并开始仿真,会看到如下报错:
⚠️此时打开新建出来 Graph 下的 Graph 并开始仿真,会看到如下报错:
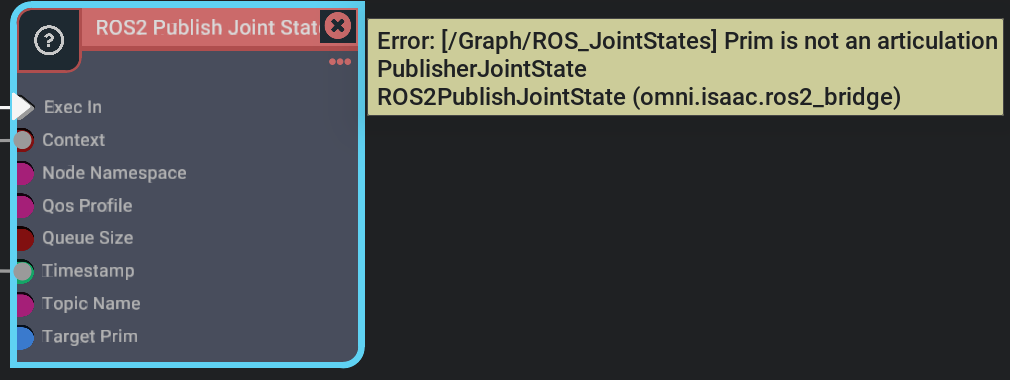
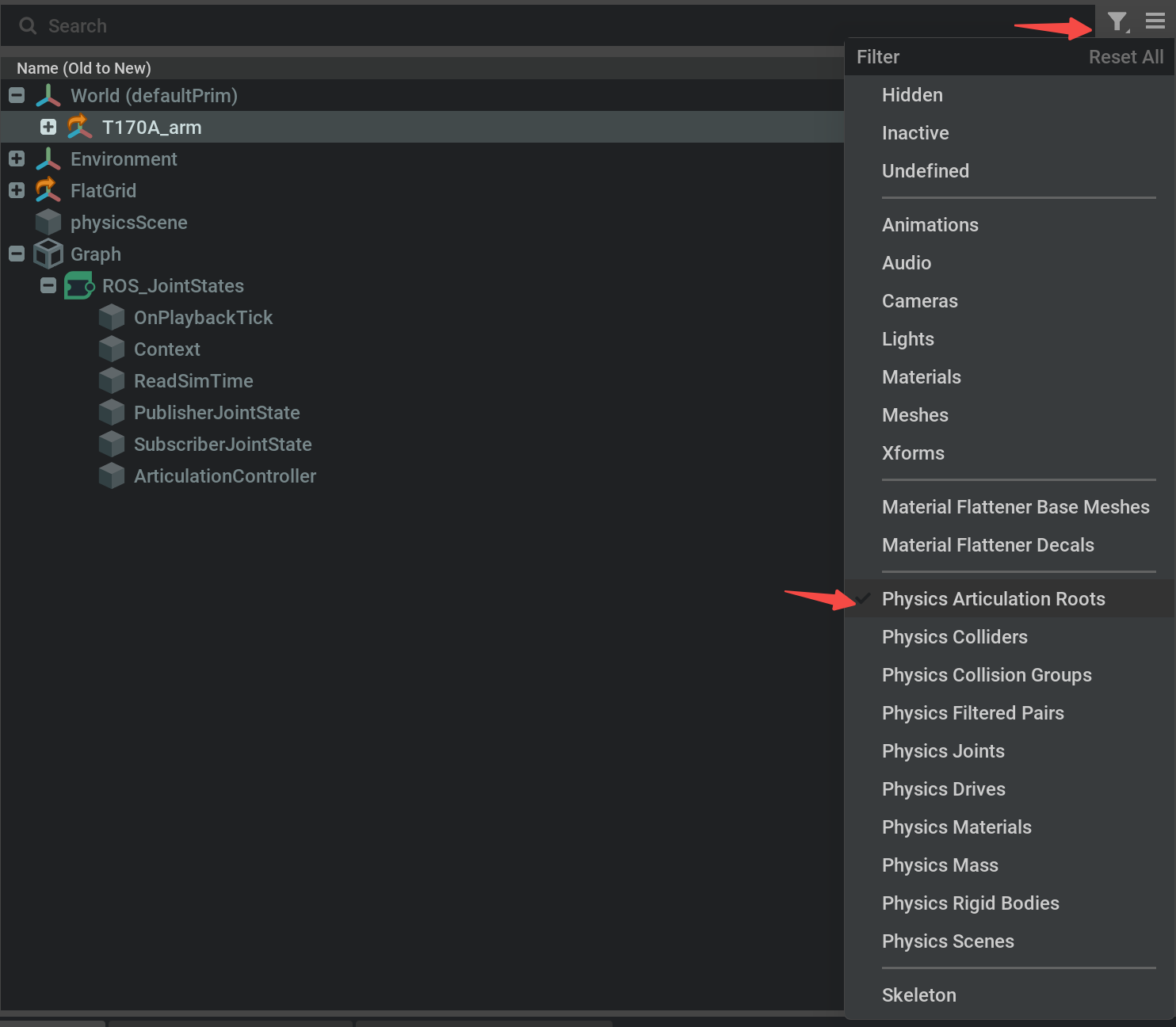
这是因为模型的 Articulation Root 不在模型的根目录,接下来我们通过筛选器找出模型的 Articulation Root 保存在哪,把他删除。
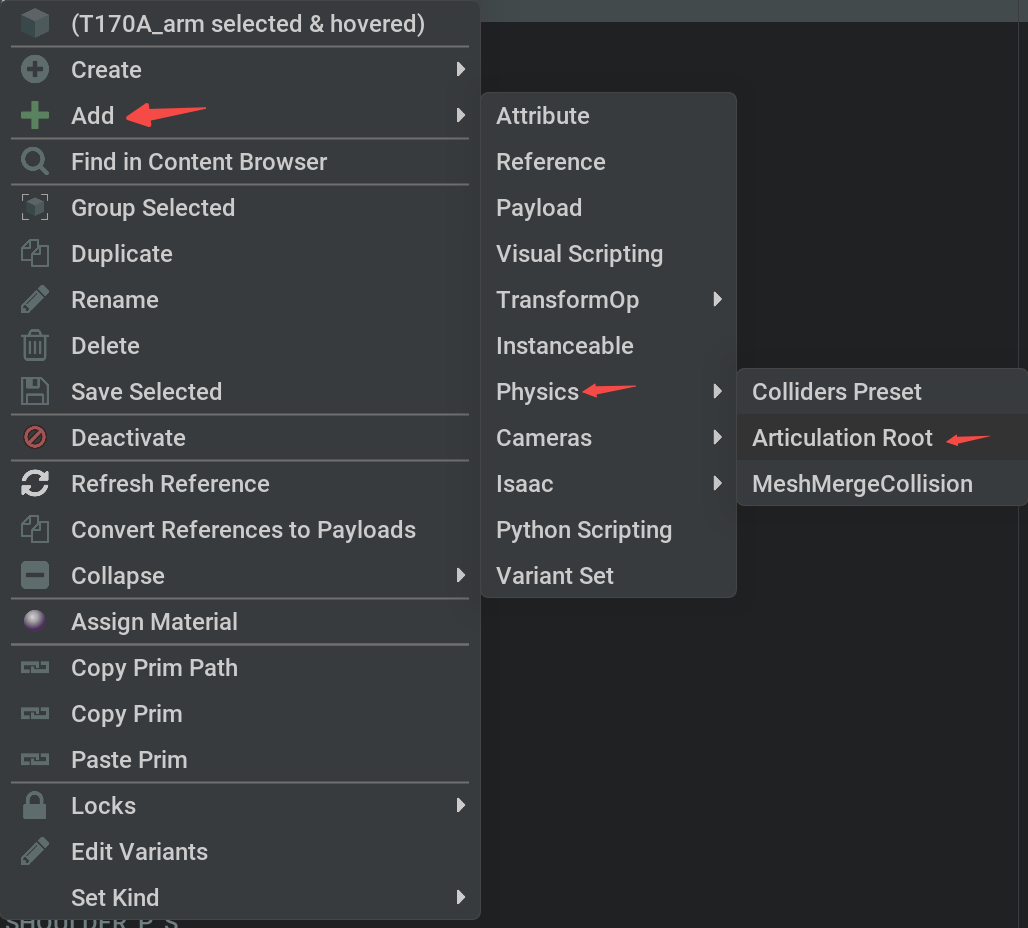
 再在根目录下添加
再在根目录下添加Articulation Root
 开始仿真后即可在ros2中观察到:
开始仿真后即可在ros2中观察到:

本文由作者按照 CC BY 4.0 进行授权