LyraStarterGame 03.人物移动和转身动画解析
距离匹配和步幅适配
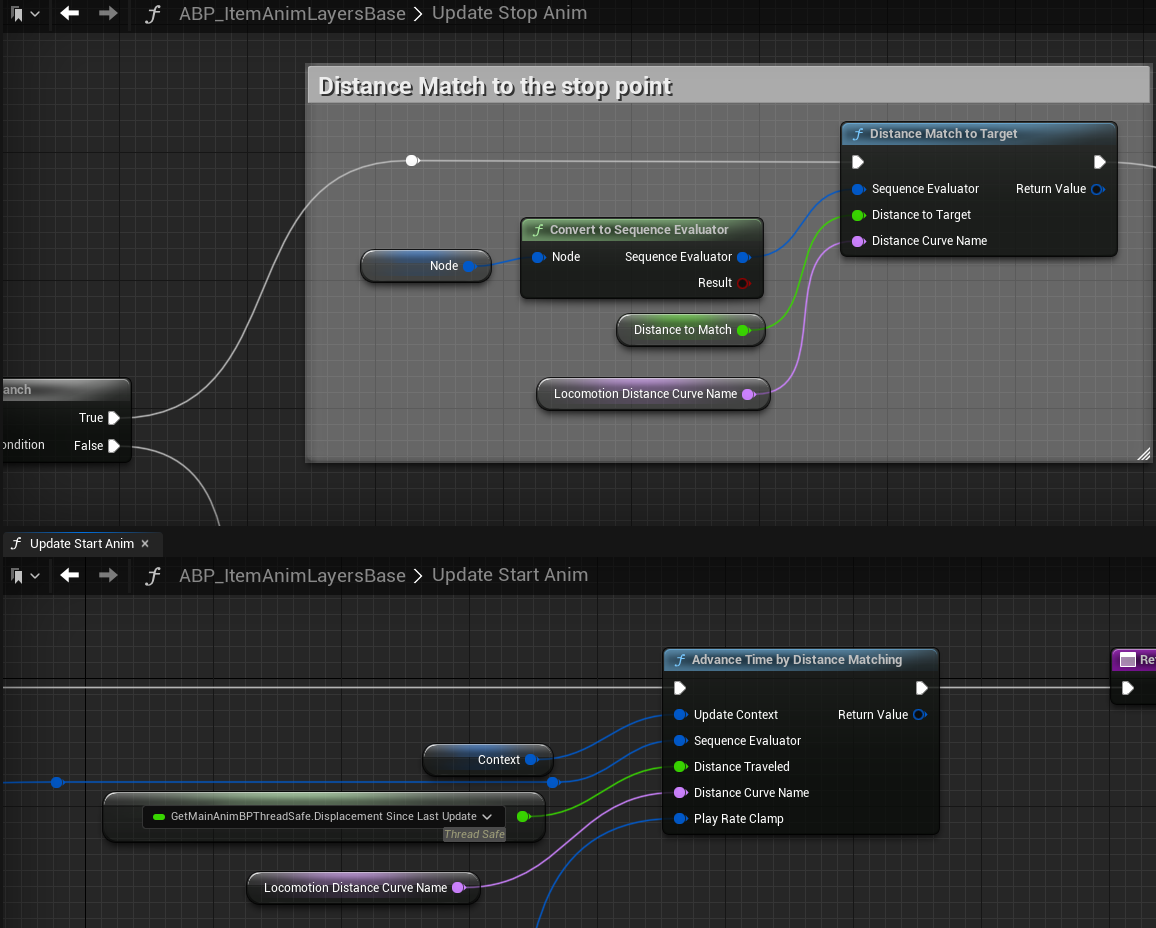
距离匹配(Distance Matching)
调整动画的播放速率,例如开始、停止和着陆动画等运动动画资产。
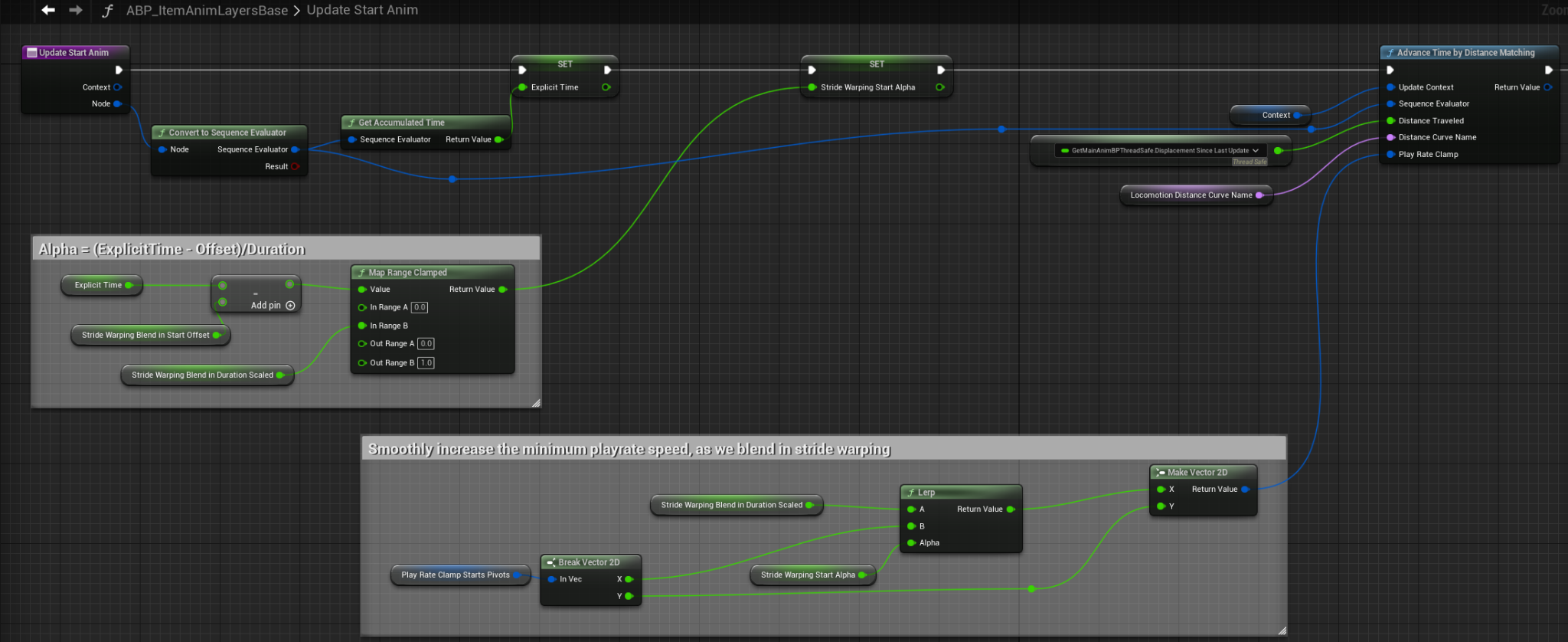
步幅适配(Stride Warping)
用于动态调整角色的步幅长度,这适用于不调整播放速率的情况,例如角色进入慢跑(Jog)状态时。
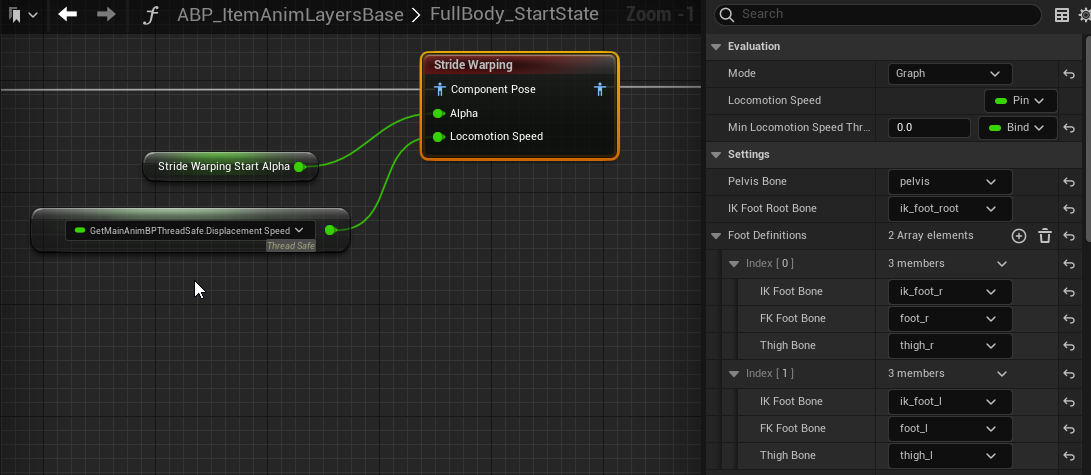

结合这两种方法之后,你可以动态地选择侧重于其中一种方法。在开始状态期间,我们首先使用距离匹配(Distance Matching)来保留姿势,然后在接近慢跑(Jog)状态时使用步幅适配(Stride Warping)来混合。
挖个坑,实现的详细解析。
TurnInPlace
TurnInPlace #1
/Game/Characters/Heroes/Mannequin/Animations/ABP_Mannequin_Base.ABP_Mannequin_Base/AnimGraph
当Pawn的所有者旋转时,网格组件会随之旋转,这会导致角色的脚部滑动。
在这里,我们通过抵消角色的旋转来保持脚部位置不动。
TurnInPlace #2
/Game/Characters/Heroes/Mannequin/Animations/ABP_Mannequin_Base.ABP_Mannequin_Base/UpdateRootYawOffset
此函数处理根据Pawn所有者当前状态来更新偏航偏移量。
TurnInPlace #3
/Game/Characters/Heroes/Mannequin/Animations/ABP_Mannequin_Base.ABP_Mannequin_Base/SetRootYawOffset
我们会限制偏移量,因为当偏移量过大时,角色需要转动得太远,导致脊柱扭曲得过度。虽然转身动画通常能跟上偏移量,但如果用户旋转相机过快,这会导致脚部滑动。
如果需要,可以将这个限制替换为使用能达到180度的瞄准动画,或者更积极地触发转身动画。
TurnInPlace #4
/Game/Characters/Heroes/Mannequin/Animations/ABP_Mannequin_Base.ABP_Mannequin_Base/SetRootYawOffset
我们希望通过瞄准动作来抵消偏航偏移量,以保持武器的瞄准方向与相机对齐。
TurnInPlace #5
/Game/Characters/Heroes/Mannequin/Animations/ABP_Mannequin_Base.ABP_Mannequin_Base/ProcessTurnYawCurve
当偏航偏移量变得过大时,我们触发转身动画来将角色旋转回来。例如,如果相机旋转了90度到右侧,它将面向角色的右肩。如果我们播放一个旋转角色90度到左侧的动画,角色将重新面朝相机。
我们使用“TurnYawAnimModifier”动画修饰符在每个转身动画中生成必要的曲线。
有关触发转身动画的示例,请参见 ABP_ItemAnimLayersBase。
TurnInPlace #6 (also see AnimBP_Mannequin_Base)
当偏航(yaw)偏移量变得足够大时,我们触发一个“TurnInPlace”动画来减少偏移量。
“TurnInPlace”动画通常会以一些平稳的动作结束,表示旋转完成。在这个过程中,我们会进入“TurnInPlaceRecovery”状态。如果偏移量再次变大,系统会从该状态切换回“TurnInPlaceRotation”状态。
通过这种方式,如果Pawn的所有者持续旋转,我们可以继续播放“TurnInPlace”动画的旋转部分,而无需等待平稳动作结束。
总结
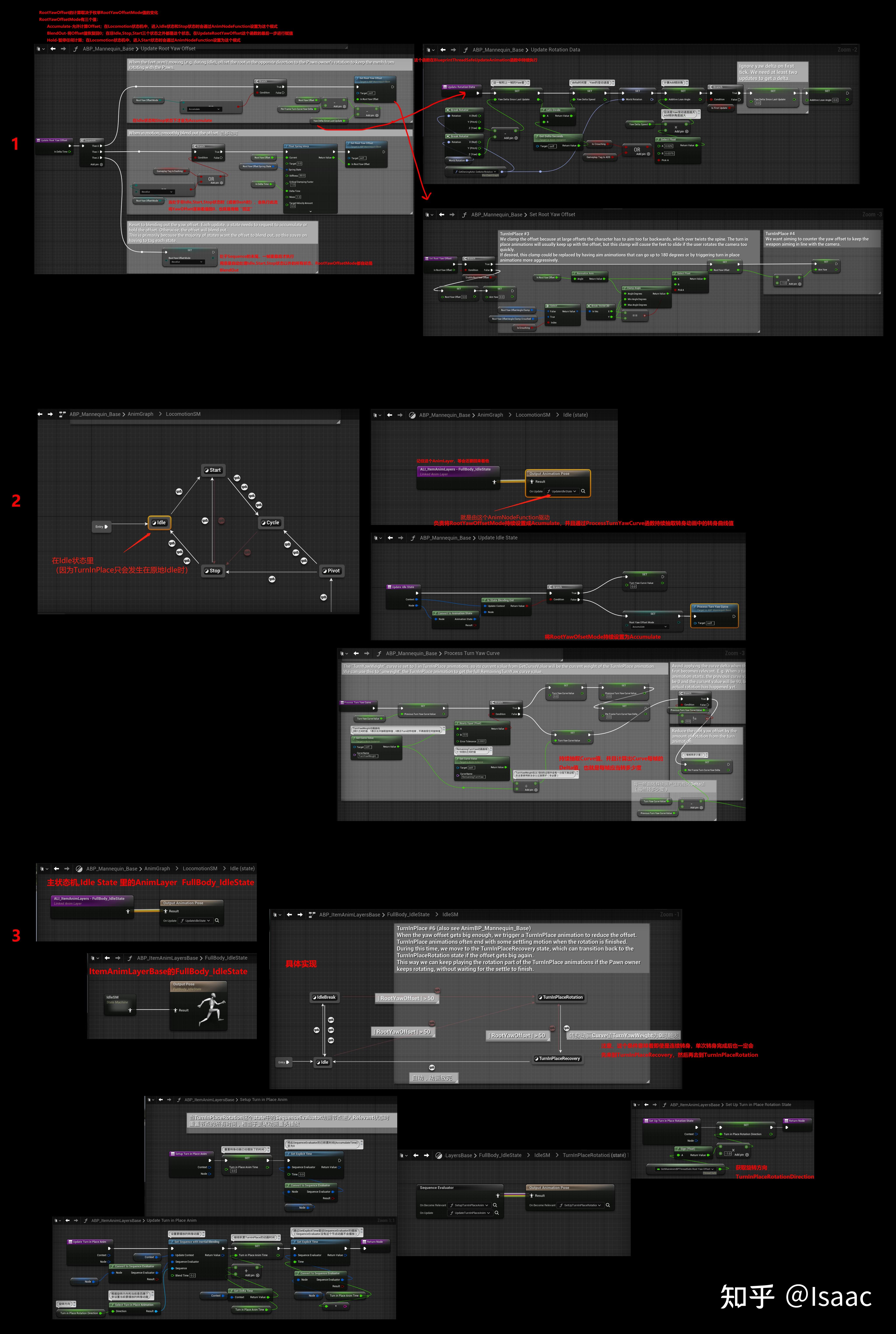
大致思路就是在Idle和Stop状态下每帧都计算 RootYawOffset ,用于抵消下半身的旋转,防止产生滑步旋转,通过独立的下半身转身动画来完成转身。
如果旋转角度超过一个小阈值状态机就转到 TurnInPlaceRotation ,此时上半身旋转下半身不旋转,在 TurnInPlaceRecovery 状态进行下半身旋转,但是如果旋转角度过大,在 TurnInPlaceRotation 就会让下半身进行旋转,实现在 ABP_Mannequin_Base/ProcessTurnYawCurve 。
http://supervj.top/2023/11/14/Lyra_%E5%8A%A8%E7%94%BB/